Autodesk Support
2025年2月14日
涵盖的产品和版本
在 Robot Structural Analysis 中,正交各向异性刚度矩阵组成/系数中的 1 和 2 的方向是什么。
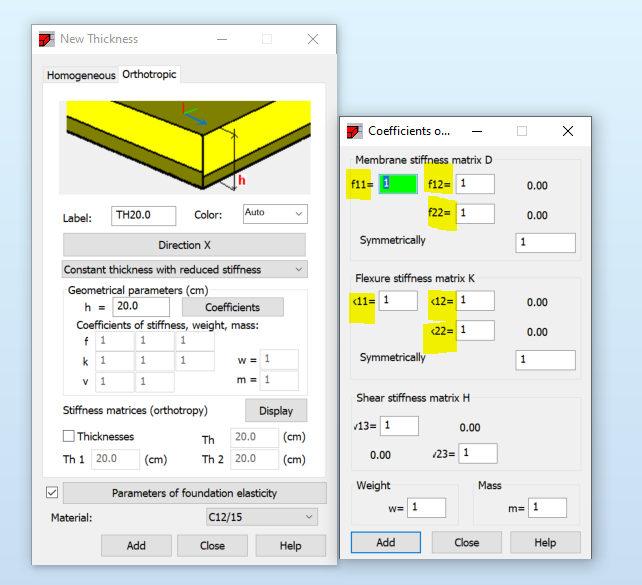
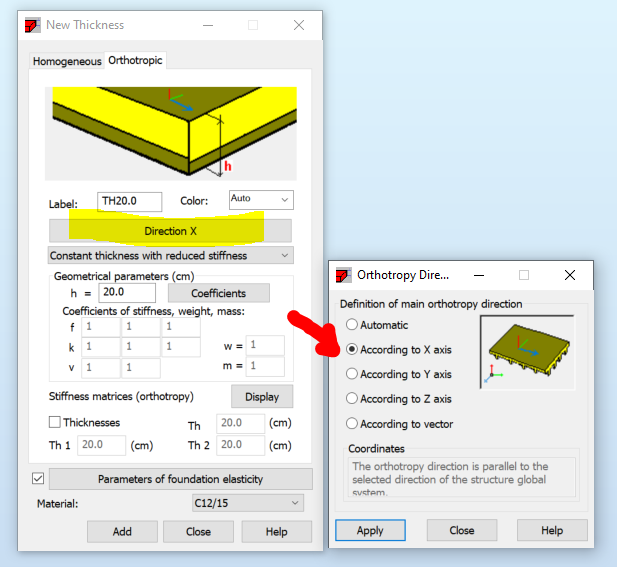
方向 1 和 2 是指主正交各向异性方向 (1) 和与主正交各向异性方向 (2) 垂直的方向。主正交各向异性方向在“厚度”对话框中定义,可以参考局部面板 x 轴(自动)、全局方向(X,Y,Z)或任意选择的矢量。
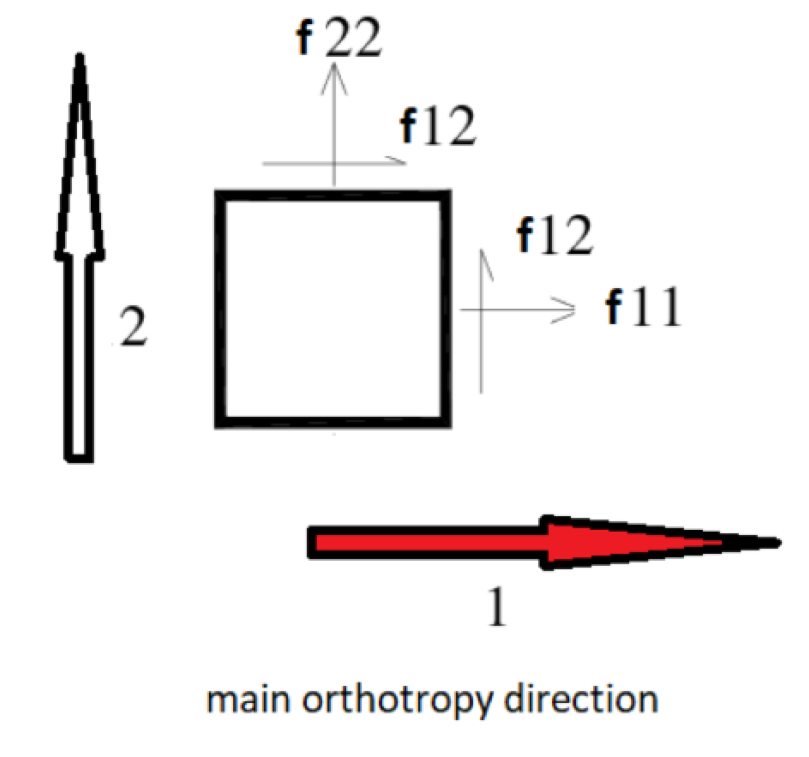
当设置主正交各向异性方向时,应将其视为方向 1,并且方向 2 垂直于 1(在面板平面中)
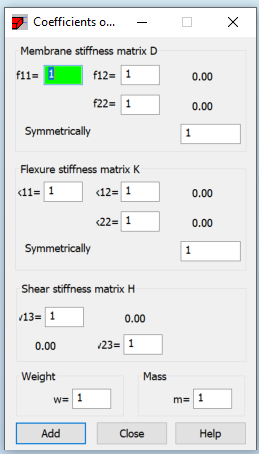
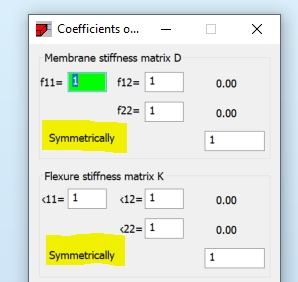
Robot Structural Analysis 使用张量约定进行刚度矩阵定义和结果演示。系数用于修改为选定的正交各向异性类型和直径确定的刚度矩阵分量。
与膜刚度矩阵系数相关的多向异性方向
注意
系数表中的“对称”表示刚度基体对称,并且基体对角线以下的分量与对角线上的分量相同。
此信息是否有用?
助手可以帮助您找到答案或联系支持人员。
您享有什么级别的支持?
不同的固定期限使用许可方案提供了不同级别的支持。了解您的许可方案提供的支持级别。
查看支持级别